| 中心主任: | 香港城市大学机械工程学系 殷鹏 教授 |

| 中心主任: | 殷鹏 教授 | 电话: | (852) 3442-2759 |
|---|---|
| 传真: | +(852)-3442-2759 |
| Email: | pengyin@cityu.edu.hk |
殷鹏教授在哈尔滨工业大学取得学士学位,在中国科学院获得了博士学位。加入香港城大之前,殷教授在卡内基梅隆大学(CMU)机器人研究所工作,担任过美国宇航局(NASA)火星着陆项目高级顾问,并负责美国国防高级研究计划局(DARPA)地下挑战赛和NVIDIA的终身导航系统的研究工作。殷博士在多个顶级会议和期刊上发表了大量论文,包括IROS, ICRA, RSS, RAL, IEEE T-RO, IEEE TIE, 和IEEE TITS。其中,他以第一作者身份在著名的IEEE《机器人学汇刊》(IEEE T-RO)上发表了三篇论文。殷鹏教授还担任了IEEE《工业电子学报》(TIE)、IEEE《智能交通系统学报》(TITS)、IEEE《机器人与自动化学报》(TRA)、IEEE国际会议等多家期刊和会议的审稿人。
殷教授领导着跨学校跨学科领域的MetaSLAM项目。MetaSLAM项目汇集了六年来在现场机器人学领域的研究成果,致力于推动大规模多机器人系统在定位、建模、感知和决策方面的进步。殷博士一直在盖尔实验室(GAIRLAB)不断迭代通用机器人领域,设计并开发了一套适用于复杂室内外环境交互的通用机器人软硬件架构。殷教授与国内领先公司在矿区无人驾驶、城市众包地图和车路协同系统等方面展开了深入合作。他研发的地图自动拼接技术已在中美两国的相关无人驾驶应用中得到广泛应用。
研究领域:
可横向合作巡检机器人的研究成果:机器人的空间理解
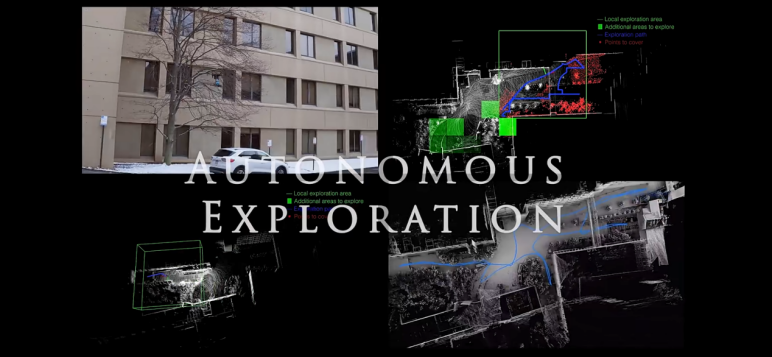
机器人的空间理解能力必须具备多样性,因此机器人需要具备捕捉长程信息和自我更新的能力,并将环境理解从局部特征提升到语义级别特征。为此,GairLab提供全套的硬件设备和软件算法使机器人满足长时间,高精度的定位导航任务。Cyberbox为硬件系统,将激光雷达,360相机,IMU集于一体。AutoMerge为软件算法,提供了离线和在线模式下的地图拼接功能。离线模式下,AutoMerge 通过里程计约束生成子地图,并直接进行全局地图的数据关联和合并。在线模式下,基于 LiDAR 里程计的估计,每个机器人可以在本地子地图生成自适应的地点描述子,并将其传输到 AutoMerge 服务器。依赖于设计的具有视角不变性的描述子,AutoMerge 可以在不同地图片段之间确定精确的数据关联。这些子地图通过优化机制整合到一个具有全局一致性的激光雷达地图中。同时,每个机器人还可以通过定位模块方法来推断它们的全局地图中的位置,并且全程无须GPS信息的介入。
AutoMerge 提供了离线和在线模式下的地图拼接功能。离线模式下,AutoMerge 通过里程计约束生成子地图,并直接进行全局地图的数据关联和合并。在线模式下,基于 LiDAR 里程计的估计,每个机器人可以在本地子地图生成自适应的地点描述,并将其传输到 AutoMerge 服务器。依赖于设计的具有视角不变性的描述子,AutoMerge 可以在不同地图片段之间确定精确的数据关联。这些子地图通过优化机制整合到一个具有全局一致性的激光雷达地图中。同时,每个代理还可以通过定位模块方法来推断它们的全局地图中的位置。